
Infrared Light Source for 3D Sensing in Vehicle Interiors
In recent years, the importance of in-vehicle sensing has increased significantly, proven by the mandatory installation of advanced driver assistance systems in all new vehicles in Europe.
The importance of in-cabin sensing is increasing. As we anticipate the need for even more advanced in-cabin sensing in the future, our company is advancing the development of infrared light sources."
Sensing Trends in the Interior Market
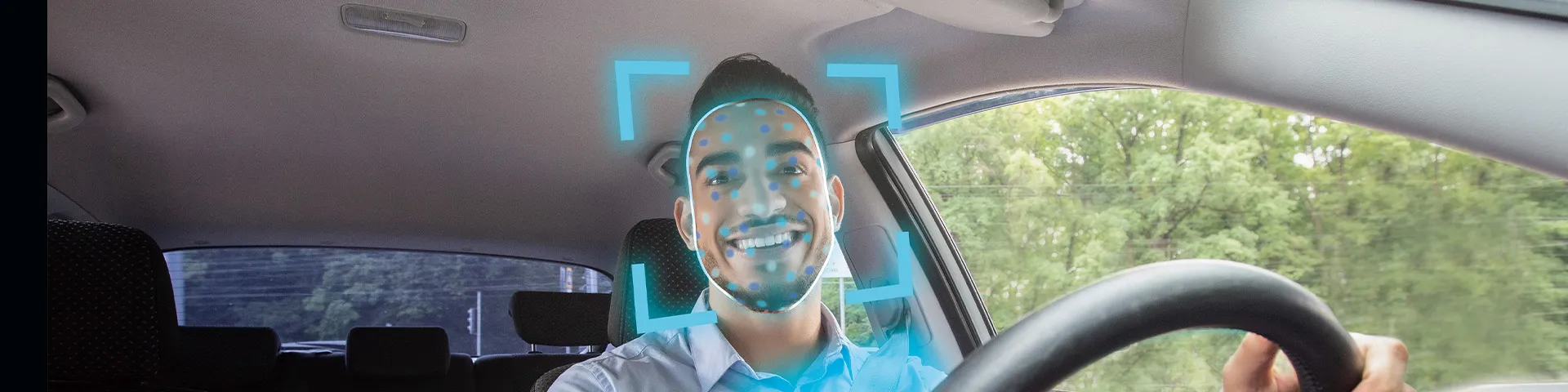
In the European and American markets, regulations mandate that from July 2026 onwards, all new vehicles must be equipped with a Driver Monitoring System (DMS) to detect driver distraction and drowsiness.
As regulations and safety standards continue to be strengthened for safety and security, our company will continue the development of infrared light sources in line with future in-cabin sensing trends.
Future predictions for sensing functions ※Referencing GSR/NCAP future predictions

What is 3D Sensing?
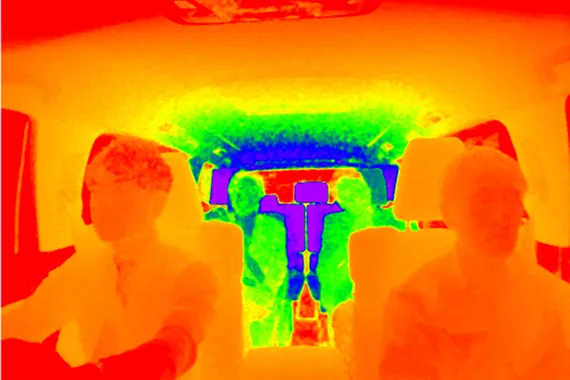
3D sensing is a detection method that captures the shape, position, and distance of objects in three dimensions.
Traditional 2D sensing is limited to information within a flat image, whereas 3D sensing incorporates depth information, enabling three-dimensional object analysis.
This facilitates more complex and detailed data analysis, allowing for the implementation of various additional functions within automobiles.
-

2D Sensing
Flat images captured by conventional cameras
-
3D sensing
Acquires depth (distance information) in addition to standard 2D images
3D sensing techniques
We introduce representative 3D sensing techniques using our infrared light source.
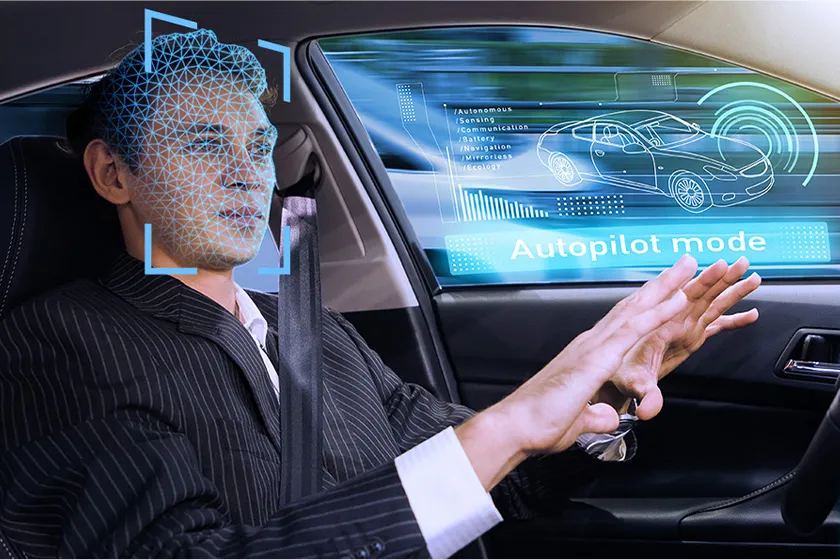
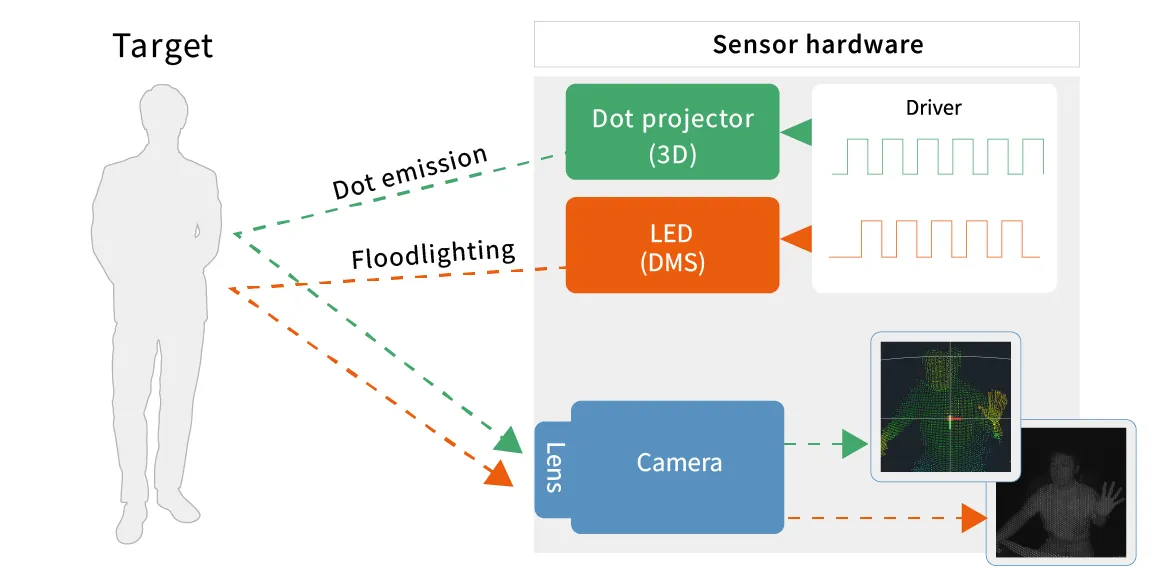
Structured light method
The Structured Light method involves projecting patterned light from a projector onto an object and capturing the details of that object with a camera. This method measures the 3D shape of the object from the captured camera image.
Features of the Structured Light Method
- Enables 3D detection using the same drivers and sensors as those employed in DMS
- Suited for close-range detection (~2m), enabling high-precision detection at short distances
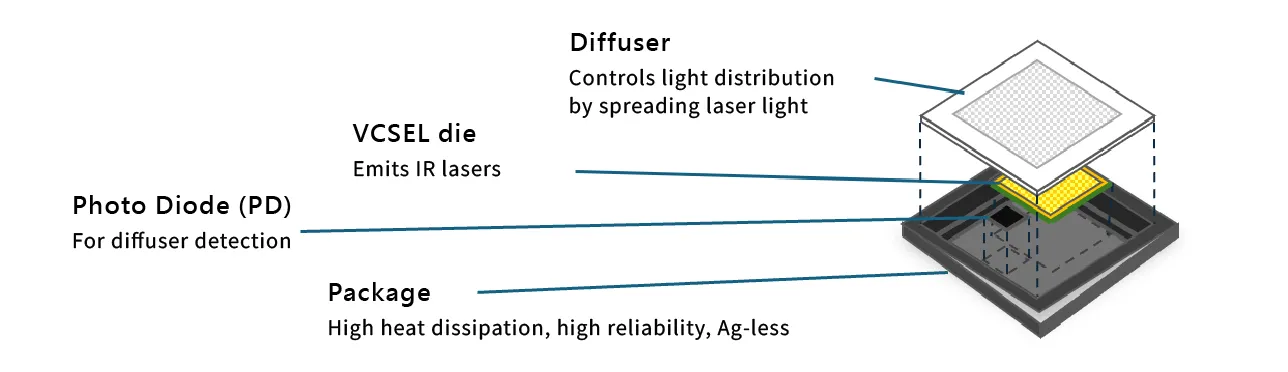
開発品 Dot Projector VCSEL
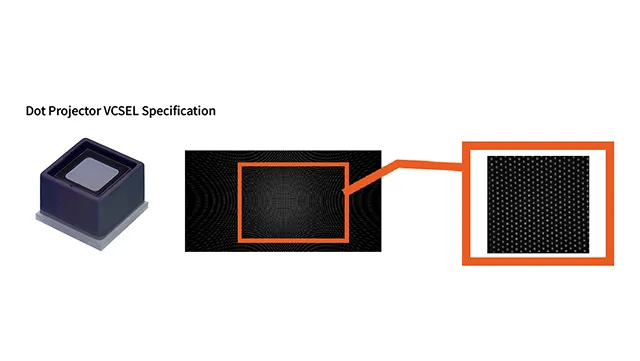
*As this product is under development, specifications are subject to change.
| specification | TypeA | TypeB |
|---|---|---|
| Forward current [A] Tw:300us / duty 1% |
4.0 | 6.0 |
| Output power [W] | 3.0 | 10.0 |
| Output power [W] | 2.1 | 3.8 |
| Wavelength [nm] | 940 | 940 |
| FOI X [deg] | 140 | 140 |
| FOI Y [deg] | 110 | 110 |
| The number of dots | 10,000@140x110deg | 10,000@140x110deg |
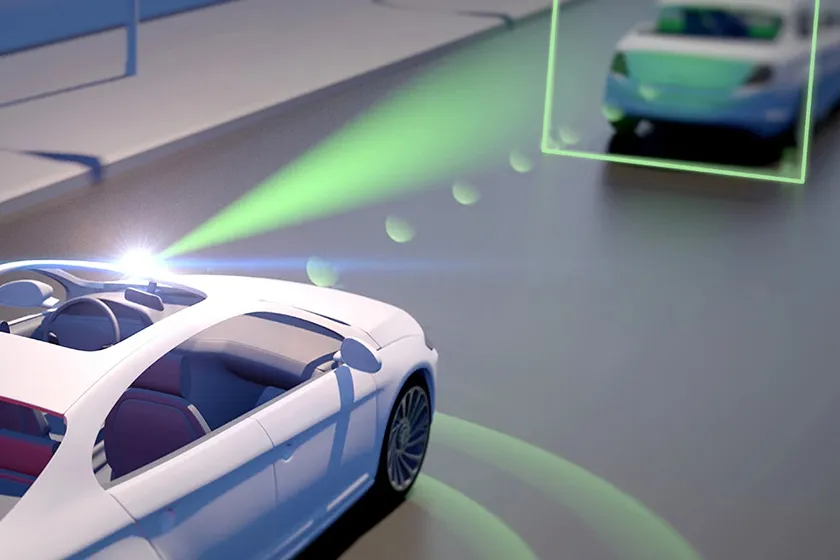
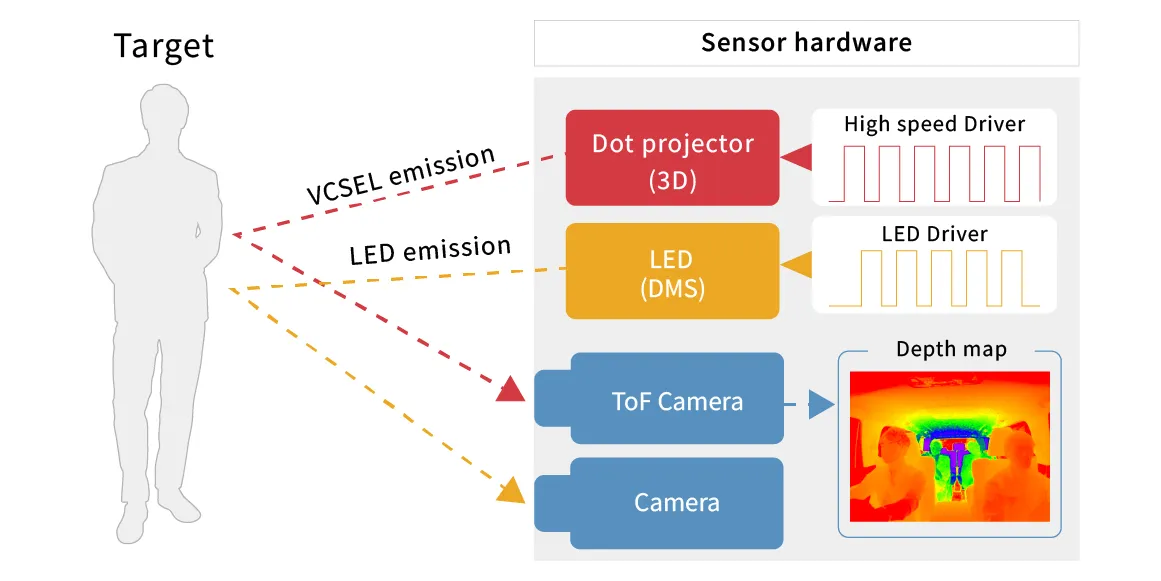
Time-of-Flight (TOF) Method
This method measures the distance to an object by calculating the time difference between the light emitted from the light source reaching the object and the reflected light being detected by the receiver sensor. In addition to acquiring XY-axis images, it also captures Z-axis information, enabling sensing in three-dimensional space.
It measures distance using the time taken for light reflected from the object to return, or by detecting phase differences.
Features of the TOF method
- Consistent detection accuracy from close to long range
- Resistant to interference from external light due to operation with short pulse widths
- Images containing distance information can be easily acquired
IR VCSEL